Tutorials
Optitrack system
Start the motive software
Connect to the same network of mocap system
Copy the server address of the mocap system and your ip address then paste it in the following file:
mocap_optitrack_driver/config/mocap_optritrack_driver_params.yaml
mocap_optitrack_driver_node:
ros__parameters:
connection_type: "Unicast" # Unicast / Multicast
server_address: "198.17.0.120"
local_address: "198.17.0.48"
multicast_address: "239.255.42.99"
server_command_port: 1510
server_data_port: 1511
....
Launch mocap otitrack driver
ros2 launch mocap_optitrack_driver optitrack2.launch.py
Activate the mocap optitrack driver node
ros2 lifecycle set /mocap_optitrack_driver_node activate
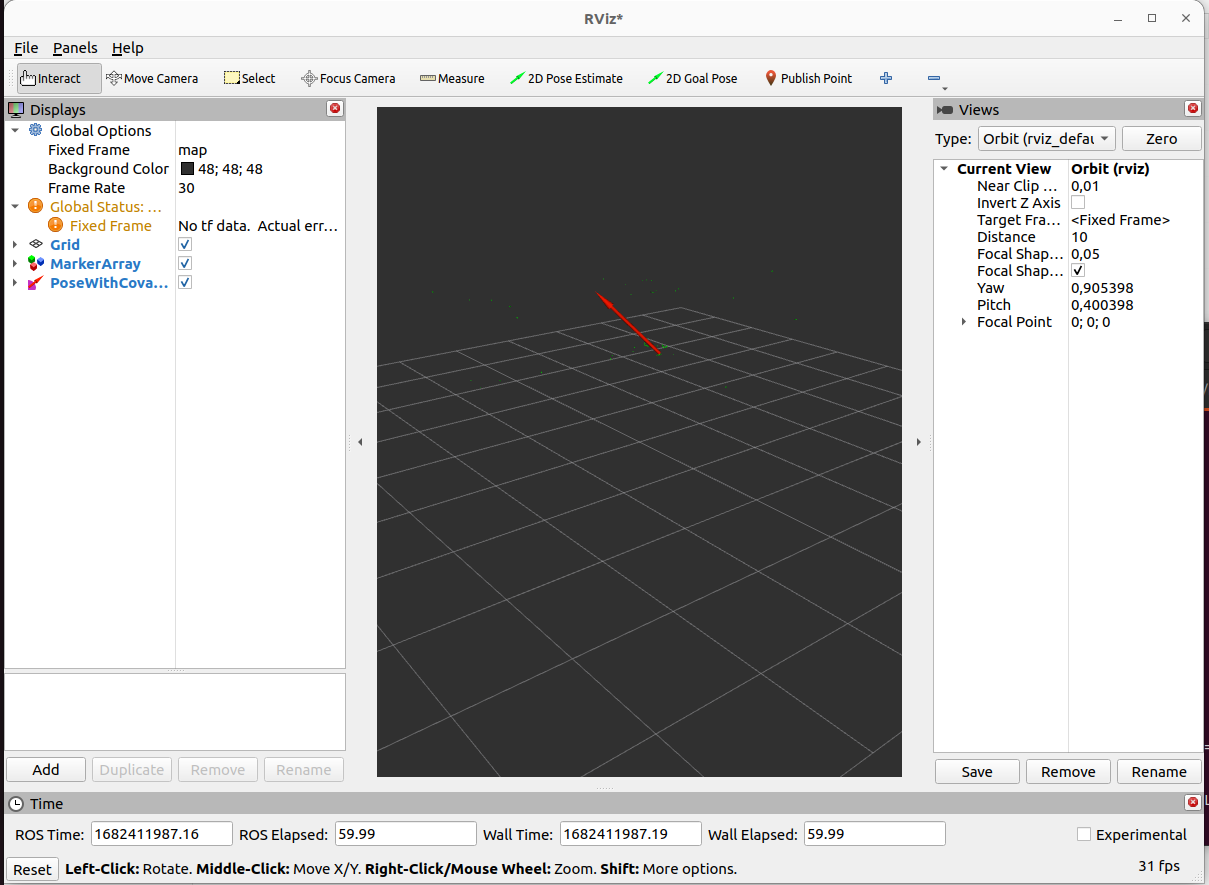
Create markers in Rviz
mocap4ros2_ws$ source install/setup.bash
ros2 run mocap_marker_viz mocap_marker_viz
Run Rviz2
rviz2 rviz2
|